

Инженеры превратили три шланга для душа в лазающего по стенам робота
 Японские и британские инженеры создали робота, способного лазать по стенам и другим вертикальным поверхностям.
Японские и британские инженеры создали робота, способного лазать по стенам и другим вертикальным поверхностям. 
Toyohashi University of Technology / YouTube
Для этого он использует две вакуумные присоски и три шланга для душа, позволяющие передней части робота отклоняться во время каждого шага на угол до 180 градусов. Статья с описанием разработки опубликована в журнале Soft Robotics.
Перемещение по вертикальным и горизонтальным перевернутым поверхностям — технически сложная задача, которую нужно решить, например, при создании устройств для ремонта или уборки фасадов зданий. Поскольку обычные колеса для этого не подходят, инженеры предлагают использовать для закрепления на поверхности другие, зачастую сложные, механизмы, такие как адгезия или электроадгезия. Однако устройства, использующие эти механизмы, сложны и дороги в производстве, поэтому такие роботы могут быть нерентабельными.
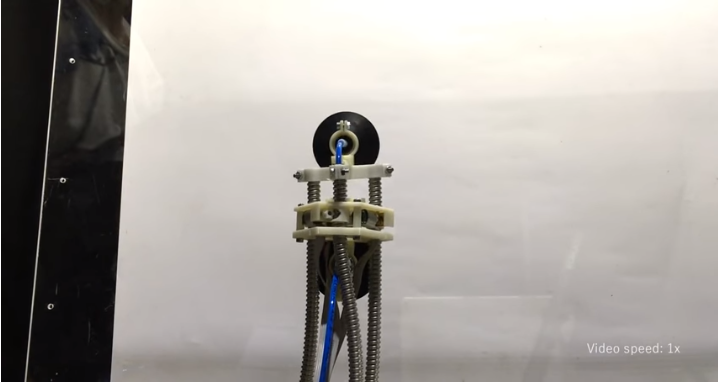
Фумия Иида (Fumiya Iida) и его коллеги из Кембриджского университета и Технологического университета Тойохаси создали простого робота, состоящего из доступных компонентов, и использующего простую конструкцию. Робот состоит из трех водопроводных шлангов, на конце и середине которых установлено две вакуумные присоски, соединенных с насосами в основании. Три шланга жестко соединены между собой в конце, а также продеты через треугольную конструкцию в середине. В ней располагаются три электродвигателя с шестернями, совпадающими по размеру с периодом оплетки шлангов.
Во время движения робот сначала держится за стену с помощью обеих присосок, а затем отпускает переднюю, передвигает ее в нужную сторону с помощью двигателей и снова закрепляет ее на стене. После этого он снижает давление на задней присоске, передвигает ее и закрепляет. Таким образом робот может относительно свободно передвигаться по вертикальным поверхностям.
Кроме того, инженеры показали, что робот способен перемещаться между поверхностями, изгибаясь через угол. Разработчики продемонстрировали, как робот способен перелезть на поверхность, повернутую на 90 градусов или даже на параллельную поверхность, для чего ему приходится изгибаться на 180 градусов. Инженеры отмечают, что каждая из двух присосок способна удерживать груз массой до 1,7 килограмм, а скорость движения робота во время экспериментов составляла до двух сантиметров в секунду.
В прошлом году инженеры из Массачусетского технологического института разработали другого робота, использующего для перемещения две присоски. Он оборудован микроскопом и подсветкой, что позволяет использовать его для изучения состояния кожи пациента.
Источник: nplus1.ru
1
Другие новости
Написать комментарий: