

Дрон научили менять форму для преодоления узких проходов (3 фото + видео)
 Ученые разработали квадрокоптер, который умеет менять форму, к примеру для преодоления узких проходов в здании.
Ученые разработали квадрокоптер, который умеет менять форму, к примеру для преодоления узких проходов в здании.Хотя дроны могут помочь в исследовании труднодоступных, опасных мест, например территорий, пострадавших при природных катастрофах, у них есть один существенный недостаток: эти аппараты, как правило, довольно широкие — и им не протиснуться, например, в узкие проемы в здании. Новый экспериментальный дрон, разработанный швейцарскими исследователями, пробует решить данную проблему: он умеет складываться — и в таком виде может преодолеть довольно узкий проход.
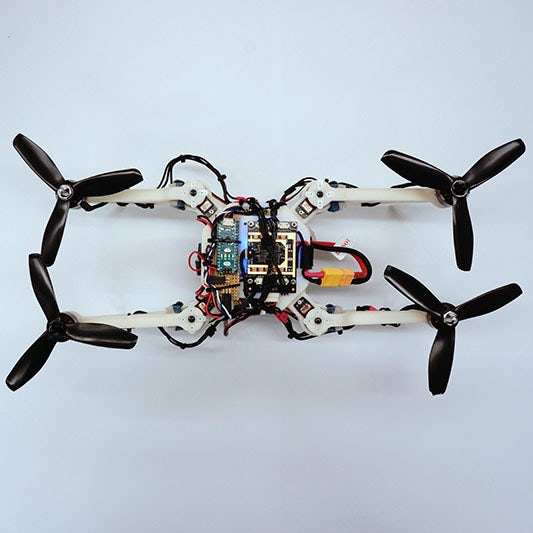
В начальном виде «руки» квадрокоптера, на которых располагаются роторы, имеют привычную X-образную (если смотреть сверху) конфигурацию. При этом когда аппарату необходимо протиснуться в узкий вертикальный проем, две фронтальные «руки» вытягиваются вперед, две задние — назад: таким образом дрон становится значительно уже. Есть и другие варианты для складывания «рук» дрона: например, когда квадрокоптеру надо пройти через горизонтальный проем, все «руки» дрона могут сложиться — и аппарат также станет ощутимо меньше.

Все четыре «руки» дрона управляются независимо отдельными сервомоторами, которые, в свою очередь, контролируются специальными микропроцессором. Отмечается также, что тяга каждого из роторов настраивается автоматически, чтобы обеспечивать стабильный полет аппарата при различных конфигурациях.
Исследователи, разработавшие прототип, надеются в будущем сделать аппарат еще более автономным. Работа, посвященная разработке, опубликована в журнале IEEE Robotics and Automation Letters, а кратко о ней сообщает портал New Atlas.
Источник: www.popmech.ru
0
Другие новости
Написать комментарий: