

Как научить робота передвигаться по крайне пересеченной местности?
 Обыкновенные роботы довольно неуклюже передвигаются по сильно пересеченной или каменистой местности, а уж когда дело доходит до двуногих человекоподобных роботов, задача и вовсе становится практически невыполнимой. По крайней мере, так было раньше.
Обыкновенные роботы довольно неуклюже передвигаются по сильно пересеченной или каменистой местности, а уж когда дело доходит до двуногих человекоподобных роботов, задача и вовсе становится практически невыполнимой. По крайней мере, так было раньше.Исследователи из Hybrid Robotics Group, компании, основанной при Калифорнийском университете в Беркли, работают над созданием роботов, которые не падают, даже пересекая крайне каменистую местность. С помощью машинного обучения, команда смогла «научить» роботов перешагивать даже через те камни, которые они никогда не видели прежде.
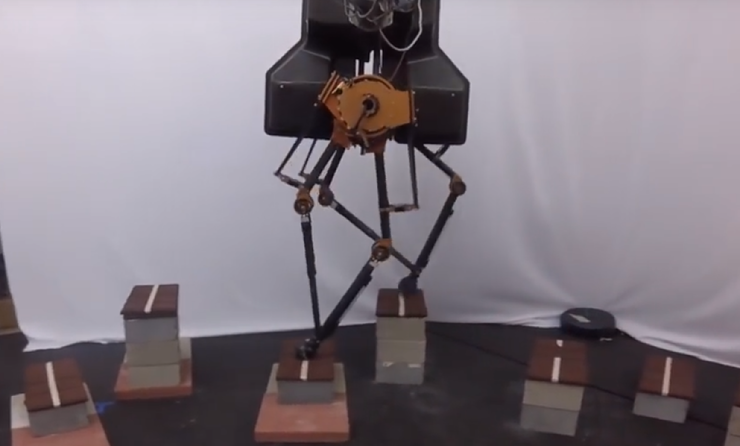
Такие роботы уникальны, так как они бипедальны и используют сочетание балансирования и прыжков, чтобы не упасть с блоков.
«Наши методы позволяют совершать динамическое хождение, не похожее на более медленные, квазистатичные движения, которые обычно используют роботы, — пишут исследователи. - Приняв во внимание последние успехи в области оптимальной и нелинейной технологии управления, мы можем точно определить цели управления и желаемое поведение робота в простой и компактной форме, одновременно гарантируя формальную стабильность и безопасность. Это значит, что наши роботы могут ходить по пересеченной местности, не падая».
Пока эти роботы «слепые» и не могут использовать визуальный сигнал для планирования следующего движения, так что двигаются по сенсорам и на ощупь, достигая при этом очень неплохих результатов.
0
Другие новости
Написать комментарий: